ABSTRACT
The Self-Driving RC Car using Raspberry Pi is an autonomous robotic system designed to navigate its surroundings without any human intervention. The primary objective of this project is to develop a low-cost, efficient, and reliable self-driving vehicle capable of detecting obstacles and making real-time decisions to move safely. The system makes use of ultrasonic sensors to continuously measure the distance between the vehicle and surrounding objects, enabling effective obstacle detection and avoidance.
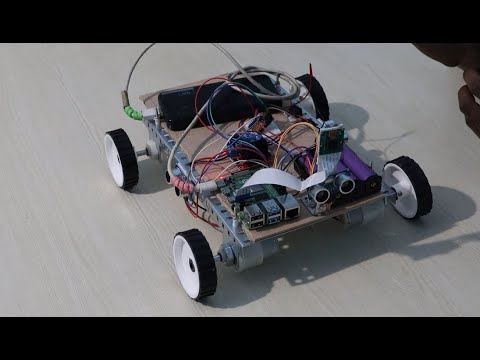
At the core of the system is the Raspberry Pi, which acts as the main processing and control unit. The Raspberry Pi collects distance data from multiple ultrasonic sensors placed at the front and sides of the RC car. Based on this sensor data, the Raspberry Pi processes the information in real time and determines the appropriate movement of the vehicle, such as moving forward, turning left or right, or stopping to avoid collisions. A motor driver module is interfaced with the Raspberry Pi to control the DC motors, allowing precise control of speed and direction.
This project focuses on embedded system integration, sensor interfacing, and real-time decision-making without relying on cloud computing or external servers. All computations are performed locally on the Raspberry Pi, which ensures low latency, faster response times, and reliable operation even in offline conditions. The obstacle avoidance logic is implemented using simple yet effective algorithms that prioritize safety and smooth navigation in unknown environments.
The Self-Driving RC Car serves as an excellent practical platform for understanding the fundamentals of autonomous systems, robotics, and real-time control. It demonstrates how sensors, processors, and actuators work together to create an intelligent system capable of interacting with its environment. The project can be further enhanced by integrating advanced technologies such as computer vision, machine learning, GPS navigation, and wireless communication for remote monitoring and control.
Overall, this project provides a strong foundation for future research and development in autonomous vehicles and robotics. It is suitable for academic learning, prototype development, and real-world experimentation, making it an ideal project for engineering students interested in embedded systems, robotics, and intelligent transportation systems.
INTRODUCTION
Autonomous vehicles have emerged as one of the most significant research areas in the fields of robotics, artificial intelligence, and embedded systems. With rapid advancements in sensing technologies, processing units, and control algorithms, autonomous systems are increasingly being adopted in real-world applications such as self-driving cars, industrial robots, warehouse automation, and smart transportation systems. A Self-Driving RC Car acts as a compact, low-cost, and practical platform for understanding and experimenting with the fundamental concepts of autonomous navigation and robotic control.
The Self-Driving RC Car using Raspberry Pi is designed to operate without human intervention by sensing its environment and making real-time decisions. The system relies on ultrasonic sensors to detect obstacles in its surroundings and estimate their distance from the vehicle. These sensors play a crucial role in ensuring safe navigation by continuously monitoring the path ahead and identifying potential collisions. By analyzing this sensor data, the system determines the safest direction of movement, enabling the vehicle to move forward, turn, or stop when necessary.
The Raspberry Pi serves as the central processing and control unit of the system. It collects distance measurements from the ultrasonic sensors, processes the data in real time, and executes decision-making algorithms to control the movement of the vehicle. Compared to traditional microcontrollers, the Raspberry Pi offers higher computational power, flexibility, and support for high-level programming languages such as Python. This makes it an ideal choice for implementing real-time control logic and future enhancements such as image processing and machine learning-based navigation.
Motor control is achieved using a motor driver module interfaced with the Raspberry Pi. The motor driver receives control signals from the Raspberry Pi and regulates the operation of the DC motors, allowing precise control over the speed and direction of the RC car. This integration of sensors, processing unit, and actuators forms a complete embedded system capable of autonomous operation.
One of the key advantages of this project is that all processing is performed locally on the Raspberry Pi. This ensures low latency, faster response times, and reliable operation even in the absence of internet connectivity. The obstacle avoidance logic is implemented using efficient and simple algorithms, making the system suitable for real-time applications and beginner-to-intermediate level robotics projects.
This project provides valuable hands-on experience in embedded systems design, sensor interfacing, real-time processing, and robotics control. It helps bridge the gap between theoretical knowledge and practical implementation. Furthermore, the Self-Driving RC Car serves as a foundation for advanced autonomous vehicle research, where additional features such as camera-based vision, machine learning algorithms, GPS navigation, and wireless communication can be integrated in future developments.
OBJECTIVES
To design a small-scale autonomous RC car using Raspberry Pi.
To implement obstacle detection using ultrasonic sensors.
To process sensor data in real time for decision making.
To control the car’s motors using a motor driver based on sensor input.
To create a low-cost, reliable, and hands-on platform for studying autonomous navigation
Block Diagram