ABSTRACT
The Smart Blind Stick is an assistive technology developed to support visually impaired individuals in navigating their surroundings safely and independently. Traditional white canes provide only limited obstacle detection and do not offer information about the type or distance of objects. To overcome these limitations, this project integrates advanced technologies such as Artificial Intelligence, Internet of Things (IoT), and real-time communication systems into a compact and user-friendly device.
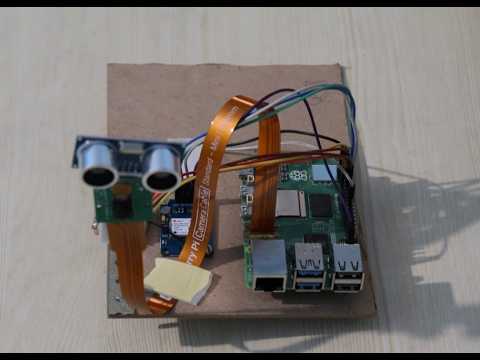
The system is built using a Raspberry Pi as the central processing unit, along with a camera module, ultrasonic sensor, GPS module, Bluetooth communication, and a push-button mechanism. The camera continuously captures real-time images, which are processed using the YOLO (You Only Look Once) object detection algorithm to identify various objects present in the environment. Simultaneously, the ultrasonic sensor measures the distance between the user and nearby obstacles, ensuring accurate spatial awareness.
The detected object information, including the type of object, its distance, and its relative position (left or right), is communicated to the user through a Bluetooth-based audio output system. This enables the user to receive instant voice feedback, allowing safer and more informed navigation. Additionally, the system incorporates an emergency feature through a push button. When activated, the GPS module retrieves the user’s current location, which is then sent to predefined contacts using the Twilio messaging service.
This project aims to enhance the mobility, safety, and independence of visually impaired individuals by providing real-time environmental awareness and emergency support. The proposed system is cost-effective, portable, and scalable, making it suitable for real-world applications. Furthermore, the integration of AI-based object detection with sensor-based distance measurement significantly improves the reliability and efficiency of assistive navigation devices. Overall, this smart blind stick represents a practical step towards leveraging modern technology to improve the quality of life for people with visual impairments.
INTRODUCTION
The ability to move independently and safely is one of the most essential aspects of human life. However, for visually impaired individuals, navigation in daily environments remains a significant challenge. According to global statistics, millions of people suffer from partial or complete vision loss, which restricts their ability to detect obstacles, recognize objects, and move confidently in both indoor and outdoor environments. This limitation often leads to dependency on others and increases the risk of accidents and injuries.
Traditionally, visually impaired individuals rely on the white cane as a primary navigation aid. While the white cane is simple, affordable, and widely used, it has several limitations. It can only detect obstacles that are physically within its reach and does not provide information about the type of object or its distance. Moreover, it cannot detect obstacles at head level or moving objects, which can pose serious threats to the user. As a result, there is a strong need for advanced assistive technologies that can overcome these limitations and provide better situational awareness.
With the rapid advancement of technology, fields such as Artificial Intelligence (AI), Internet of Things (IoT), and embedded systems have opened new possibilities for developing smart assistive devices. AI-based object detection systems, especially those using deep learning algorithms, have shown remarkable performance in identifying objects in real time. Similarly, IoT enables seamless communication between devices, allowing for real-time data processing and feedback. By combining these technologies, it is possible to design intelligent systems that can significantly improve the mobility and safety of visually impaired individuals.
This project introduces a Smart Blind Stick system that integrates AI, sensors, and communication technologies into a single compact device. The system is built around a Raspberry Pi, which acts as the central processing unit. A camera module is used to capture real-time images of the surroundings, which are then processed using the YOLO (You Only Look Once) object detection algorithm. YOLO is a state-of-the-art deep learning model known for its speed and accuracy in detecting multiple objects within a single frame. This allows the system to identify various obstacles such as people, vehicles, and other objects in real time.
In addition to object detection, the system uses an ultrasonic sensor to measure the distance between the user and nearby obstacles. The combination of object recognition and distance measurement provides a more comprehensive understanding of the environment. The system also determines the relative position of the detected object, such as whether it is on the left or right side, which further assists the user in navigation.
To communicate this information effectively, the system uses Bluetooth technology to provide voice feedback to the user. The detected object type, distance, and direction are converted into audio messages, allowing the user to receive real-time guidance without the need for visual input. This feature enhances user experience and ensures safer navigation in complex environments.
Another important feature of this system is the inclusion of an emergency alert mechanism. A push button is integrated into the stick, which can be pressed by the user in case of an emergency. Upon activation, the system retrieves the user’s current location using a GPS module. This location information is then sent to predefined contacts via the Twilio messaging service. This feature ensures that help can be quickly reached in critical situations, thereby enhancing the safety and reliability of the device.
The proposed Smart Blind Stick system is designed to be cost-effective, portable, and easy to use. Unlike many existing solutions, it combines multiple functionalities such as object detection, distance measurement, voice assistance, and emergency communication into a single device. This integration makes it a powerful tool for assisting visually impaired individuals in their daily lives.
Furthermore, the system is scalable and can be enhanced with additional features in the future. For example, improvements can be made by incorporating more advanced sensors, enhancing the accuracy of the object detection model, or integrating mobile applications for better user interaction. The flexibility of the Raspberry Pi platform allows for easy upgrades and customization based on user requirements.
In conclusion, the Smart Blind Stick represents a significant step towards leveraging modern technology to address real-world challenges faced by visually impaired individuals. By combining AI, IoT, and embedded systems, this project aims to provide a reliable, efficient, and user-friendly solution for safe navigation.
OBJECTIVE
The primary objective of this project is to design and develop a Smart Blind Stick that enhances the mobility, safety, and independence of visually impaired individuals using advanced technologies such as Artificial Intelligence, Internet of Things (IoT), and embedded systems. The system aims to overcome the limitations of traditional navigation aids by providing real-time environmental awareness and emergency support.
One of the key objectives is to implement an efficient object detection system using the YOLO (You Only Look Once) algorithm. This enables the device to identify various objects in real time through the Raspberry Pi camera, allowing users to understand their surroundings more effectively. The system is designed to recognize common obstacles such as people, vehicles, and other objects that may pose a risk during navigation.
Another important objective is to measure the distance between the user and nearby obstacles using an ultrasonic sensor. This helps in determining how close an object is, thereby enabling timely alerts to avoid collisions. In addition, the system aims to identify the relative position of objects, such as whether they are located on the left or right side, to provide better directional guidance.
The project also focuses on delivering real-time voice feedback to the user through Bluetooth communication. The detected object type, distance, and direction are converted into audio messages, ensuring that the user receives immediate and understandable guidance without relying on visual input.
An additional objective is to incorporate an emergency alert system. By pressing a push button, the device activates the GPS module to retrieve the current location of the user. This location is then sent to predefined contacts using the Twilio messaging service, ensuring quick assistance during emergencies.
Furthermore, the system is designed to be cost-effective, portable, and easy to use, making it accessible to a wide range of users. The project also aims to create a scalable platform that can be enhanced with future improvements, such as better sensors or advanced AI models.
Block Diagram