ABSTRACT
This project is an Automatic Vehicle Speed Limiter for Express Highways using ESP32, GPS, IR sensor, color sensor, keypad, motor driver, OLED, and Blynk. The system detects lanes using color sensor (red, blue, green) or keypad keys (1, 2, 3). Each lane has a fixed speed limit.
The IR sensor measures wheel speed, and GPS gives actual vehicle speed. If the vehicle goes above the speed limit, an Overspeed Alert is shown. If the speed goes even higher than the extra limit, the system enters Dangerous Overspeed Condition, and Fine is Charged. This alert and fine are also sent to Blynk.
The motor driver operates the vehicle automatically based on lane detection and can also be controlled manually from Blynk (forward, backward, left, right). The OLED displays lane color, GPS speed, IR speed, and overspeed or fine messages.
This system helps in safe driving by automatically controlling speed and sending alerts on express highways.
INTRODUCTION
High-speed express highways require proper speed control and lane discipline to avoid accidents and ensure safe travel. Many drivers fail to follow speed limits or lane rules, which leads to overspeeding, fines, and dangerous situations. To solve this problem, this project introduces an Automatic Vehicle Speed Limiter for Express Highways using modern sensors and IoT technology.
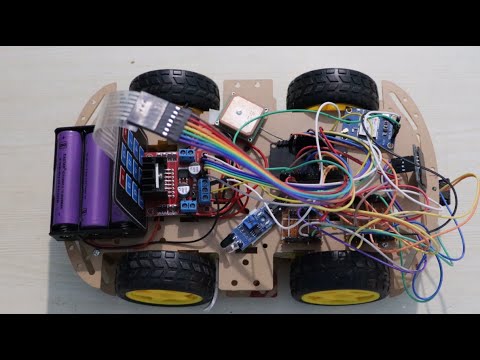
The system is built using an ESP32 microcontroller, GPS module, IR sensor, color sensor, 4×3 keypad, motor driver, OLED display, and Blynk application. The lane of the vehicle is detected using the color sensor (red, blue, green) or by selecting a lane using the keypad (1, 2, 3). Each lane has a fixed speed limit.
The IR sensor measures the actual wheel rotation speed, while the GPS gives the vehicle’s movement speed. Based on these values, the system automatically checks if the vehicle is within the allowed speed. If the speed increases above the limit, an Overspeed alert is shown. If the speed goes even higher, a Dangerous Overspeed condition occurs, and a fine is charged. These alerts are also sent to the Blynk app.
The motor driver controls the direction of the vehicle, and the vehicle can also be manually operated through the Blynk app (forward, backward, left, right). The OLED display shows lane color, speed, GPS data, and alert messages in real time.
This project provides a simple, smart, and low-cost solution that helps maintain lane discipline and safe speed control on express highways.
OBJECTIVES
1. To detect the highway lane using the color sensor (red, blue, green) or keypad lane selection (1, 2, 3).
2. To measure vehicle speed using the IR speed sensor and GPS module.
3. To set and enforce lane-based speed limits automatically according to the detected lane.
4. To identify overspeeding conditions and alert the user immediately.
5. To detect dangerous overspeeding, apply Fine Charged, and send alerts to Blynk.
6. To control the vehicle automatically based on speed and lane rules using the motor driver.
7. To provide manual control (forward, backward, left, right) through the Blynk app when needed.
8. To display real-time information such as lane color, GPS speed, IR speed, and alerts on the OLED screen.
9. To implement an IoT-based monitoring system for sending notifications and logs to Blynk.
10. To create a low-cost, efficient, and reliable speed limiter suitable for express highway safety.
Block Diagram